|
|
||
|
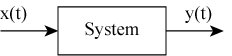
Concept: System operates on input function(s) to produce the output function(s)
Classification of systems Continuous - Discrete Continuous system: the input and output signals are continuous Discrete system: the input and output signals are discrete Linear - Nonlinear Linear system: obeys the properties of scaling (homogeneity) and superposition (additivity) Nonlinear system: does not obeys either the property of scaling or the property of superposition or both Time invariant - Time variant Time invariant system: does not depend on when it occurs (the shape of the output does not change with a delay of the input). System S where S(x(t)) = y(t) is time invariant if for all T hold S(x(t-T)) = y(t-T) When this property does not hold for a system, then it is said to be time variant or time varying Causal - Noncausal A causal system is one that is nonanticipative; the output may depend on current and past inputs, but not future inputs. All "real-time" systems must be causal, since they can not have future inputs available to them Example of an noncausal system: Stable - Unstable A stable system is one where the output does not diverge as long as the input does not diverge. In an unstable system, the output grows without limit (diverges) from a bounded input
|
 Analogue filter
Analogue filter